
พาย้อนชม 10 ยอดข่าวของวงการวิทยาศาสตร์แห่งปี 2567 ทั้งไทยและเทศ (ตอน 1) โดย รศ.ดร.ชัยวัฒน์ คุประตกุล กูรูแห่งวงการวิทยาศาสตร์ และคอลัมนิสต์ขาประจำของไทยรัฐออนไลน์
"10 ยอดข่าววิทยาศาสตร์" เป็นสกู๊ปพิเศษที่ผู้เขียนได้จัดทำต่อเนื่องกันมาเป็นเวลากว่ายี่สิบปีแล้ว สำหรับช่วงเวลาส่งท้ายปีเก่าต้อนรับปีใหม่ของทุกปี โดยผู้เขียนจะคัดเลือก 10 ข่าวหรือเหตุการณ์สำคัญทางวิทยาศาสตร์และที่เกี่ยวเนื่อง ทั้งระดับโลกและประเทศไทย ในรอบปีที่ผ่านไปหรือที่กำลังจะผ่านไป มาเล่าสู่ท่านผู้อ่าน
สำหรับ "10 ยอดข่าววิทยาศาสตร์ปี 2567" แบ่งเป็น 2 ตอน ตอนละ 5 ข่าว เป็นข่าวระดับโลก 7 ข่าว เป็นข่าวเกี่ยวกับประเทศไทย 2 ข่าว โดยที่ข่าวที่ 10 ผู้เขียนได้สงวนไว้สำหรับข่าวการจากไปของบุคคลสำคัญทางวิทยาศาสตร์หนึ่งคน
ในการจัดอันดับความสำคัญของข่าว 3 ข่าวแรกเป็นข่าวที่ผู้เขียนจัดอันดับความสำคัญอย่างตั้งใจ ข่าวที่ 4-9 ผู้เขียนก็ได้พยายามจัดอันดับความสำคัญด้วย แต่ไม่เคร่งครัดเท่าสามข่าวแรก
(1) พบน้ำเป็นมหาสมุทรอยู่ใต้พื้นผิวดาวอังคาร
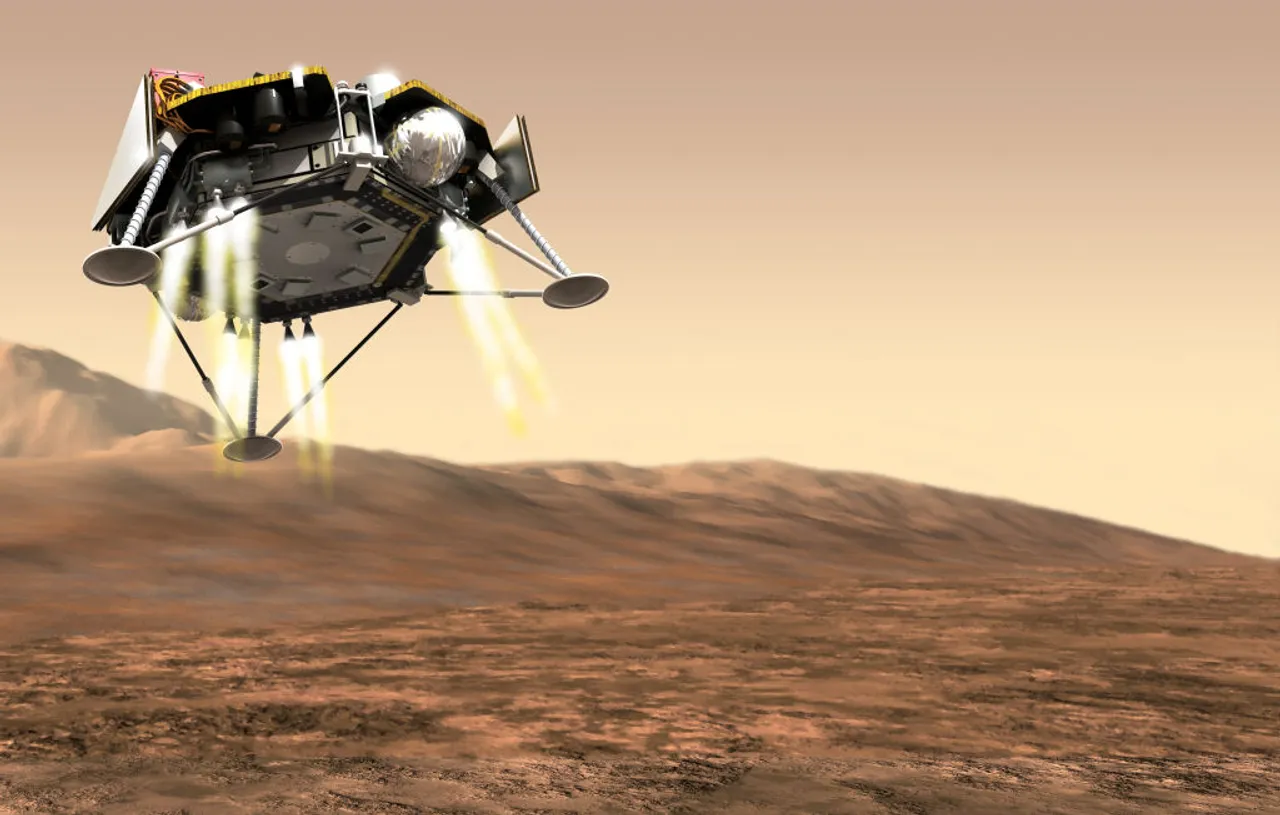
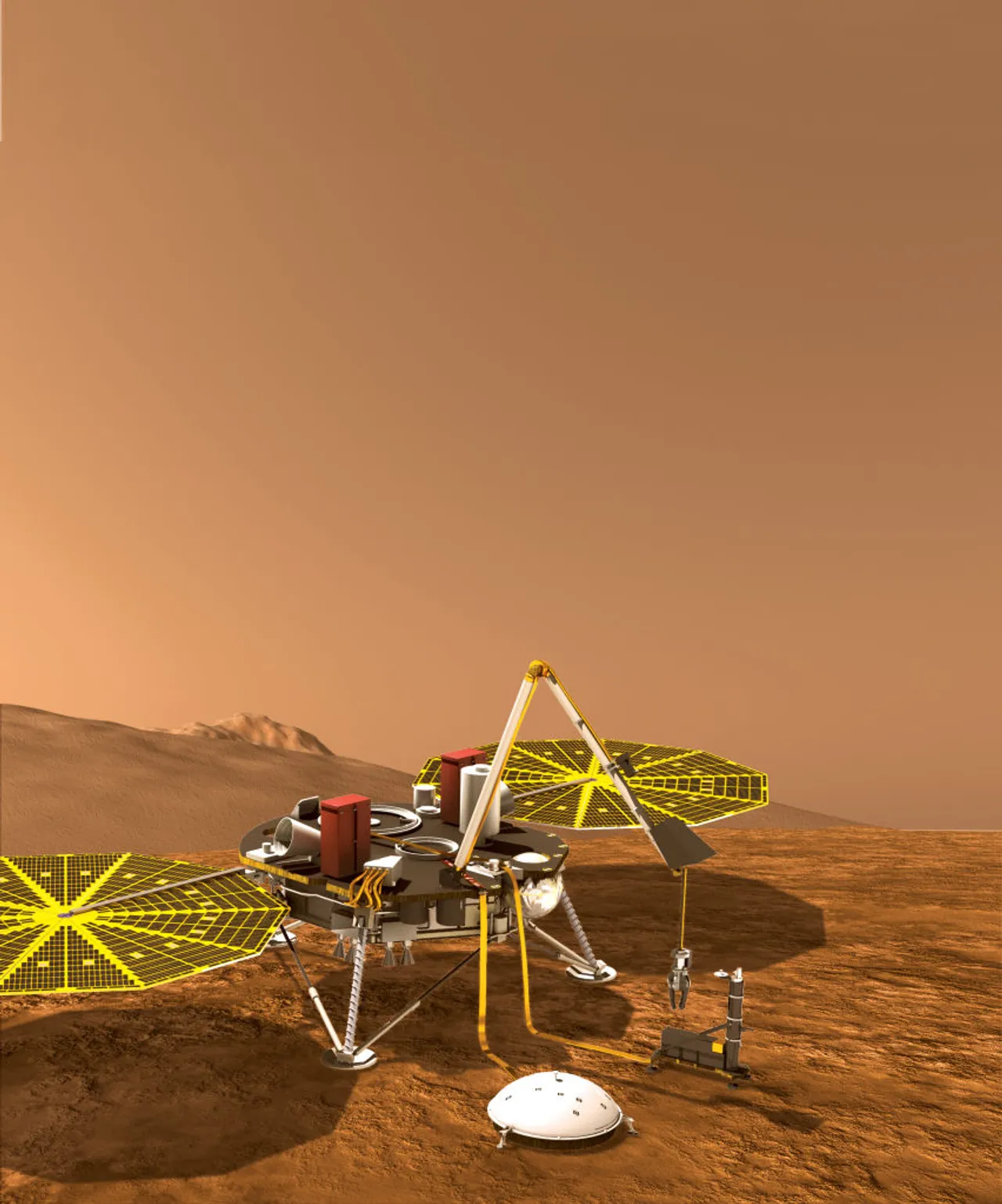
วันที่ 12 สิงหาคม พ.ศ. 2567 คณะนักดาราศาสตร์แห่งมหาวิทยาลัยแคลิฟอร์เนีย-เบิร์กลีย์ ตีพิมพ์รายงานในวารสาร Proceedings of the National Academy of Sciences ผลการศึกษาสภาพภายในดาวอังคารของยาน InSight Lander ของนาซา พบว่า มีน้ำเป็นปริมาณมากอยู่ใต้พื้นผิวดาวอังคาร ถึงระดับเป็นมหาสมุทรครอบคลุมพื้นผิวทั้งหมดของดาวอังคาร
ยาน InSight Lander ถูกส่งไปสำรวจสภาพภายในของดาวอังคาร ระหว่างปี พ.ศ. 2561 ถึง พ.ศ. 2565 โดยวิธีการศึกษาผลจากแรงสั่นสะเทือนภายในของดาวอังคารเมื่อถูกชน ในลักษณะเดียวกับวิธีการบนโลก ที่นักวิทยาศาสตร์สำรวจสภาพภายในของโลก จากแรงสั่นสะเทือนบนผิวโลก ที่ทะลุผ่านเข้าไปในชั้นต่างๆ ภายในของโลก (ถึงใจกลางโลก) แล้วสะท้อนกลับขึ้นมาบนผิวโลกที่ตำแหน่งต่างๆ เป็นวิธีการที่คณะนักสำรวจค้นหาแหล่งทรัพยากร เช่น น้ำมัน ใต้พื้นผิวโลก
...
สำหรับผลการศึกษาใหม่ พบน้ำในสภาพของเหลวอยู่ในรูพรุนของชั้นหินของดาวอังคารเป็นปริมาณมาก ถึงระดับเทียบเท่ากับน้ำเป็นมหาสมุทร ครอบคลุมพื้นผิวดาวอังคารทั้งหมด ลึกระหว่าง 1 ถึง 2 กิโลเมตร
การค้นพบน้ำบนดาวอังคารมีความสำคัญอย่างยิ่งสำหรับการตั้งอาณานิคมมนุษย์บนดาวอังคาร เพราะบนพื้นผิวดาวอังคารในปัจจุบันแห้งผาก คือ ไม่มีน้ำเลย แต่การจะใช้ประโยชน์ของแหล่งน้ำที่พบบนดาวอังคารนี้ก็เป็นเรื่องยากมาก เนื่องจากแหล่งน้ำที่พบอยู่ใต้พื้นผิวดาวอังคารลึกลงไปถึงประมาณ 11 กิโลเมตร ซึ่งแม้แต่บนโลก การขุดเจาะหาแหล่งน้ำหรือน้ำมันในปัจจุบันก็ขุดเจาะลงไปได้เพียงประมาณหนึ่งกิโลเมตรเท่านั้น
อย่างไรก็ตาม ถึงแม้แหล่งน้ำที่พบบนดาวอังคารจะอยู่ลึกมาก แต่ก็...มีอยู่...และย่อมเป็นแหล่งความหวังสำหรับมนุษย์ในอนาคตได้
สำหรับประเด็นคำถามว่า แหล่งน้ำที่พบอยู่ใต้พื้นผิวดาวอังคารนั้นมาจากไหน?
คณะนักดาราศาสตร์เจ้าของรายงานกล่าวว่า น่าจะมาจากน้ำบนพื้นผิวดาวอังคารเองในอดีต ที่มีเป็นปริมาณมาก แล้วต่อมาน้ำบนพื้นผิวดาวอังคารส่วนหนึ่งก็ระเหยหายไปในอวกาศเมื่อประมาณสามพันล้านปีก่อน แต่ก็มีส่วนหนึ่งซึมลงใต้พื้นผิวดาวอังคาร และยังเหลืออยู่ดังที่ถูกค้นพบในปัจจุบัน
(2) นาซากับโครงการสร้างรถไฟขบวนแรกบนดวงจันทร์
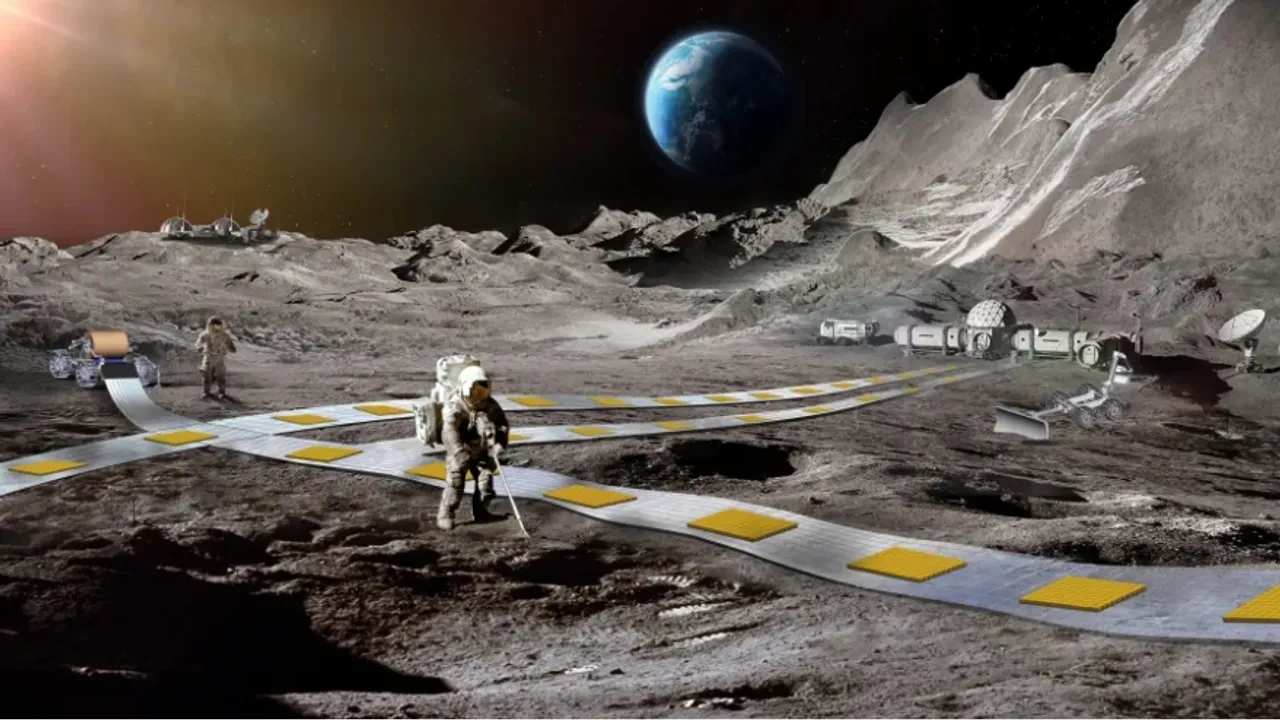
วันที่ 2 พฤษภาคม พ.ศ. 2567 องค์การบริหารการบินและอวกาศแห่งชาติหรือนาซา (NASA) ของสหรัฐอเมริกา ประกาศว่า โครงการสร้างรถไฟขบวนแรกบนดวงจันทร์ ชื่อ "โฟลต" (FLOAT: Flexible Levitation On A Track: ลอยตัวบนทางยืดหยุ่น) ได้ผ่านการคัดเลือกเข้าสู่เฟสที่สองของการพัฒนา ก่อนจะถึงเฟสสุดท้าย เพื่อดำเนินงานอย่างเป็นทางการโดยนาซาต่อไป
"โฟลต" เป็นโครงการของ Jet Propulsion Laboratory (ห้องปฏิบัติการแรงขับเคลื่อนไอพ่น) หรือ เจพีแอล (JPL) ของนาซา อยู่ที่แคลิฟอร์เนีย มี อีทาน เชเลอร์ (Ethan Schaler) วิศวกรหุ่นยนต์เป็นหัวหน้าแผนกหุ่นยนต์ (Robotics) ของเจพีแอล และเป็นหัวหน้าโครงการโฟลต
...
วิธีการสร้างรถไฟบนดวงจันทร์ของนาซาจะแตกต่างไปจากวิธีการสร้างรถไฟโดยทั่วไปบนโลก เพราะการสร้างรถไฟบนโลกต้องมีการสร้างทางรถไฟทำด้วยเหล็กกล้าอย่างถาวร และต้องใช้แรงงานคนเป็นจำนวนมาก ทำงานอยู่ในที่โล่งแจ้งเป็นเวลายาวนาน ซึ่งบนดวงจันทร์จะใช้แรงงานคนเป็นจำนวนมากไม่ได้ เพราะบนดวงจันทร์ไม่มีอากาศ ไม่มีน้ำ และไม่มีบรรยากาศที่จะปกป้องกัมมันตภาพรังสีจากดวงอาทิตย์และอวกาศ

แต่สำหรับรถไฟบนดวงจันทร์ตามโครงการโฟลต จะเป็นรถไฟแบบยกตัวและขับเคลื่อนด้วยแรงแม่เหล็ก คือ magnetic levitation (การยกหรือลอยตัวด้วยแม่เหล็ก) ดังเช่นรถไฟความเร็วสูงแม็กเลฟ (Maglev) ที่กำลังขนส่งผู้โดยสารอยู่ในหลายประเทศขณะนี้
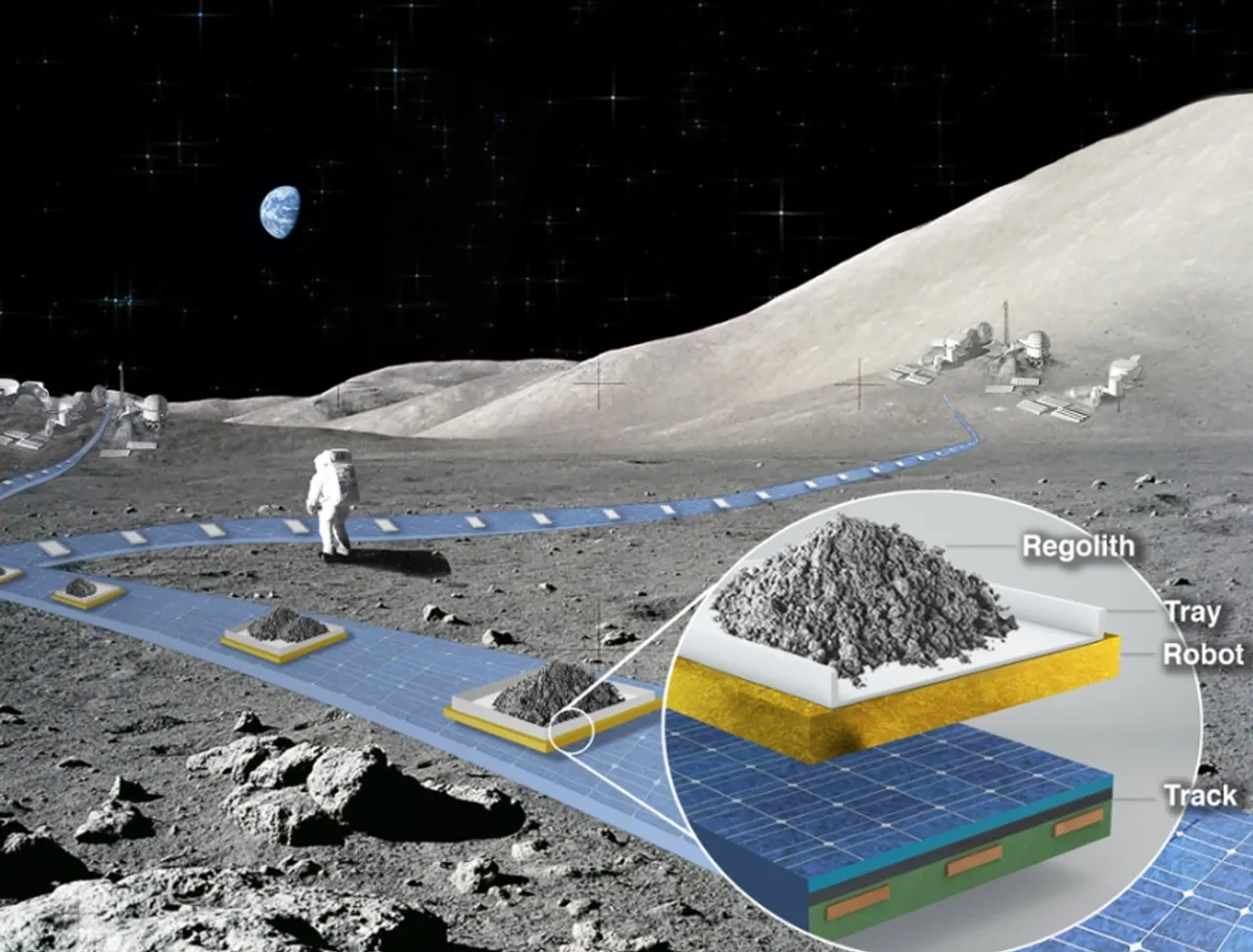
วิธีการสร้างรถไฟขบวนแรกบนดวงจันทร์ จะเป็นรถไฟระบบแม็กเลฟ ซึ่งไม่ต้องมีการสร้างรางรถไฟ แต่จะใช้ "แผ่นรอยทาง" คล้ายเสื่อหรือพรมยาว ทอดไปเป็นทางรถไฟ โดยแผ่นรอยทางจะฉาบด้วยฟิล์มมีความยืดหยุ่นสูงคือ แกรไฟต์ เพื่อสร้างแรงแม่เหล็ก ยกให้ตัวตู้รถไฟลอยอยู่บนทาง และผลักหรือดึงตู้รถไฟให้เคลื่อนที่ไปข้างหน้า หรือดึงให้ช้าลงเพื่อจอด
...
ด้วยเทคโนโลยีรถไฟแบบแม็กเลฟ จึงไม่ต้องใช้แรงงานคนไปสร้างทางรถไฟบนดวงจันทร์ แต่ผลิตแผ่นรอยทางบนโลก (ในขั้นต้น) แล้วนำไปทอดหรือคลี่ออกบนดวงจันทร์ ในแนวทางที่ต้องการ และสามารถจะม้วนเก็บ เพื่อนำไปใช้เป็นแผ่นรอยทาง สำหรับรถไฟโฟลตในทิศทางอื่นได้อีก
สำหรับตู้รถไฟ ในขั้นแรก จะไม่ใช่ตู้รถไฟดังเช่นบนโลกสำหรับผู้โดยสาร แต่จะเป็นตู้เปิดเพื่อขนส่งดิน หิน วัสดุ น้ำ เชื้อเพลิง ฯลฯ สำหรับการก่อสร้างฐานที่อยู่และห้องปฏิบัติการวิทยาศาสตร์ ในการบุกเบิกอาณานิคมบนดวงจันทร์
โครงการรถไฟโฟลตบนดวงจันทร์ได้ผ่านการพัฒนาในเฟสที่หนึ่งแล้ว ระหว่างปี พ.ศ. 2564-2567 และมีเวลาประมาณสองปีในการพัฒนาเฟสที่สอง ถ้าผ่านเฟสที่สอง ก็จะเป็นเฟสที่สามสุดท้าย ซึ่งถ้าผ่านเฟสที่สามเป็นอันจบสมบูรณ์ระยะการวิจัยและพัฒนา และก็ขึ้นอยู่กับนาซาว่า จะพร้อมที่จะนำออกปฏิบัติ คือเริ่มลงมือสร้างรถไฟขบวนแรกบนดวงจันทร์หรือไม่
...
นาซาให้ความสำคัญสำหรับโครงการโฟลต โดยประกาศเป็นส่วนหนึ่งที่สำคัญสำหรับโครงการอาร์เทมิส (Artemis) เพื่อนำมนุษย์กลับคืนสู่ดวงจันทร์เป็นครั้งที่สอง และเป็นการไปอยู่บนดวงจันทร์อย่างถาวร
(3) ญี่ปุ่น ประเทศที่ห้าส่งยานลงจอดบนดวงจันทร์ได้สำเร็จ
วันที่ 19 มกราคม พ.ศ. 2567 องค์การสำรวจอวกาศญี่ปุ่นแจ็กซา (JAXA) รายงานความสำเร็จการส่งยานสลิม (SLIM : Smart Lander for Investigating Moon) ลงจอดบนดวงจันทร์ได้สำเร็จ ทำให้ญี่ปุ่นเป็นประเทศที่ห้าที่ประสบความสำเร็จในการส่งยานลงจอดบนดวงจันทร์ โดยประเทศที่ทำได้มาก่อน คือ สหรัฐอเมริกา รัสเซีย จีน และอินเดีย
ก่อนลงจอดบนดวงจันทร์ ยานสลิมส่งรถโรเวอร์ขนาดเล็กสองคัน คือ แอลอีวี-1 (LEV-1 : Lunar Excursion Vehicle-1) และแอลอีวี-2 ลงสู่ดวงจันทร์ได้สำเร็จ

เป้าหมายหลักของโครงการสลิม คือ การทดสอบเทคโนโลยีในการนำยานลงจอดบนดวงจันทร์ให้ได้อย่างแม่นยำ คือ ภายในระยะห่างไม่เกิน 100 เมตร จากจุดเป้าหมาย แทนที่จะเป็นระยะห่างนับเป็นกิโลเมตรของยานลงจอดบนดวงจันทร์หรือบนดาวเคราะห์ของประเทศต่างๆ ทำให้ยานสลิมมีอีกชื่อหนึ่งว่า "มูนสไนเปอร์" (Moon Sniper) ตามคำเรียก พลแม่นปืนสไนเปอร์
ตำแหน่งบนดวงจันทร์ที่ยานสลิมลงจอด คือ บริเวณใกล้ขอบหลุมอุกกาบาตชิโอลิ (Shioli) ซึ่งตำแหน่งที่ลงจอดมิใช่พื้นที่ราบ แต่เป็นพื้นเอียง
ถึงแม้ยานสลิมจะลงจอดบนดวงจันทร์ได้สำเร็จตามเป้าหมาย คือ ภายในระยะห่างไม่เกิน 100 เมตรของเป้าหมาย แต่ปรากฏว่า ยานสลิมลงจอดในสภาพไม่ปกติ คือ ไม่ตั้งตรง และแผงเซลล์สุริยะหันไปทางทิศตะวันตกของดวงจันทร์ ทำให้ยานสลิมมีพลังงานเฉพาะจากแบตเตอรี่ที่ก็ต้องใช้อย่างจำกัด
แจ็กซาจึงสั่งให้ยานสลิม "หลับ" โดยหวังว่า จะได้ตื่นเพื่อรับแสงอาทิตย์บนดวงจันทร์ได้ ซึ่งแจ็กซาก็ไม่แน่ใจว่า ยานสลิมจะตื่นขึ้นมาอีกหรือไม่

อย่างไรก็ตาม ในที่สุดยานสลิมก็ตื่นและรับแสงอาทิตย์ได้ และจึงปฏิบัติภารกิจใหญ่ตามเป้าหมายได้สำเร็จ จนกระทั่งแจ็กซาไม่สามารถติดต่อยานสลิมได้อีก และสั่งยุติปฏิบัติการของยานสลิมอย่างเป็นทางการในวันที่ 23 สิงหาคม พ.ศ. 2567
นอกเหนือไปจากเป้าหมายใหญ่ของโครงการสลิม ในการทดสอบเทคโนโลยีนำยานลงจอดบนดวงจันทร์อย่างแม่นยำแล้ว โครงการสลิมก็มีภารกิจในการศึกษาสภาพทางธรณี โดยเฉพาะอย่างยิ่ง แร่ธาตุโอลิวีน (olivine) ที่จะช่วยยืนยันว่า ดวงจันทร์มีกำเนิดจากการเป็นส่วนหนึ่งของโลกมาก่อน และก็เป็นการทดสอบเทคโนโลยีเพื่อการส่งยานอวกาศไปลงจอดบนดวงจันทร์โฟบอส (Phobos) ของดาวอังคารในอนาคต เพื่อเก็บตัวอย่างดินหินบนโฟบอสกลับมาศึกษาที่โลกต่อไป

(4) นักดาราศาสตร์ไทยค้นพบ 13 กาแล็กซีใหม่
วันที่ 1 กุมภาพันธ์ พ.ศ. 2567 เฟซบุ๊กของสถาบันวิจัยดาราศาสตร์แห่งชาติ (องค์การมหาชน) หรือ NARIT (National Astronomical Research Institute of Thailand) รายงานผลงานของคณะนักดาราศาสตร์ไทยที่ NARIT ค้นพบกาแล็กซีใหม่ 13 กาแล็กซี ผลงานที่ได้รับการนำลงตีพิมพ์แล้วในวารสาร Astrophysical Journal Letters
ผลงานของคณะนักดาราศาสตร์ไทย นำโดย ดร.ณิชา ลีโทชวลิต ได้ศึกษาภาพถ่ายจักรวาลในระยะแรกเริ่ม จากกล้องโทรทรรศน์อวกาศเจมส์ เวบบ์ (James Webb Space Telescope) ซึ่งถูกออกแบบให้สามารถเจาะศึกษาจักรวาลลึกถึงระยะแรกเริ่มของการก่อกำเนิด ที่ประกอบด้วยดาวฤกษ์และกาแล็กซีมีความสว่างน้อย
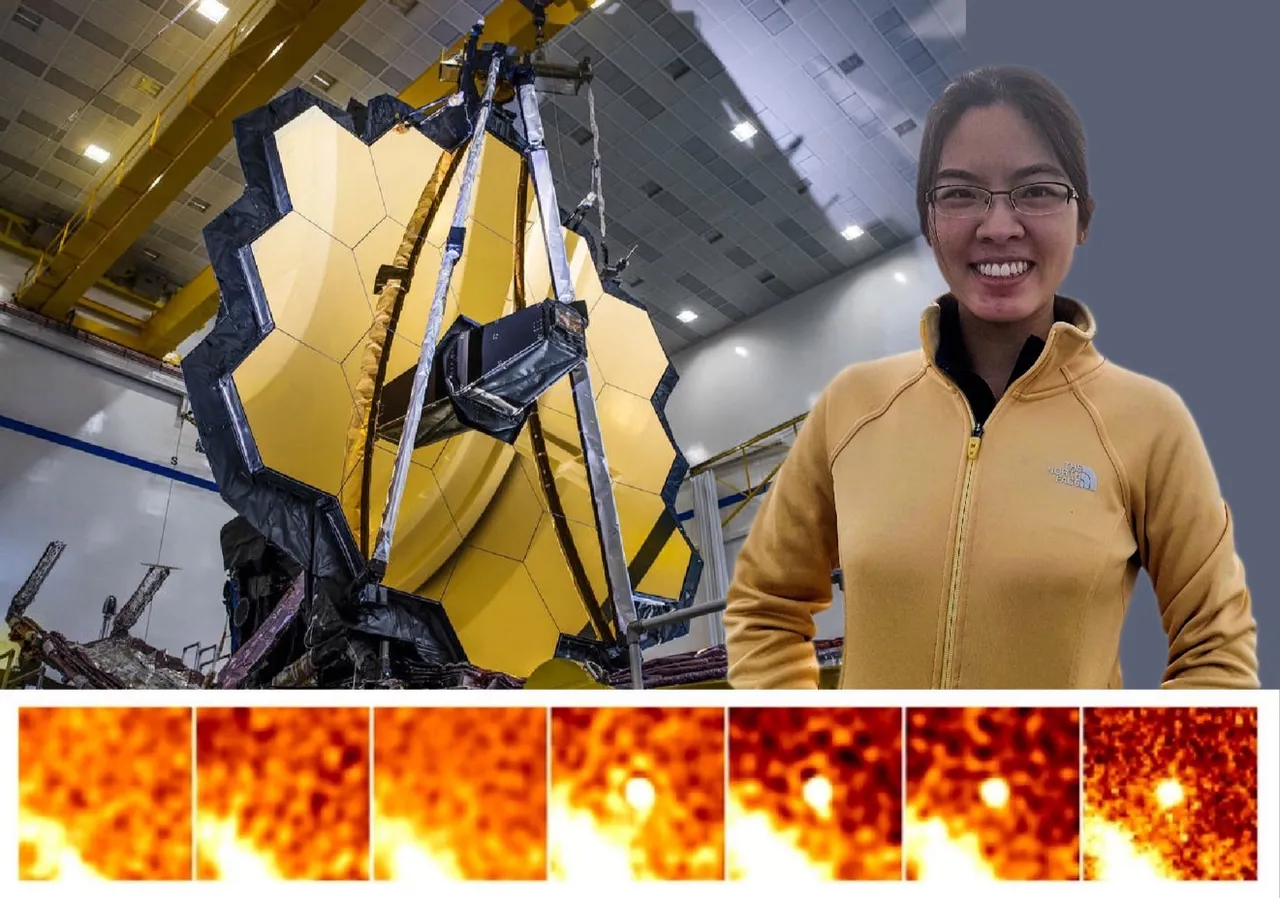
คณะนักดาราศาสตร์ที่ NARIT ได้ร่วมศึกษาจักรวาลในระยะแรกเริ่ม โดยเข้าร่วมในโครงการ GLASS-JWST-ERS (Glass - James Webb Space Telescope – Early Release Science) ที่สามารถเข้าถึงภาพและข้อมูลของจักรวาลในระยะแรกๆ จากกล้องเจมส์ เวบบ์ และได้ค้นพบกาแล็กซีขนาดเล็กมวลน้อยจำนวน 13 กาแล็กซี ทั้งหมดเป็นกาแล็กซีมีอายุน้อยหรือหลังกำเนิดบิกแบงเพียงประมาณ 550 ถึง 700 ล้านปี หรือเมื่อประมาณเกือบหนึ่งหมื่นสามพันล้านปีก่อน (จักรวาลมีอายุประมาณหนึ่งหมื่นสามพันแปดร้อยล้านปี)
กาแล็กซีที่ค้นพบใหม่ทั้ง 13 กาแล็กซี มีมวลน้อยกว่ากาแล็กซีทางช้างเผือกของเรา 10-100 เท่า และบรรดากาแล็กซีเหล่านี้ กำลังมีดาวฤกษ์เกิดใหม่เป็นจำนวน 1-10 ดวงต่อปี โดยที่ดาวฤกษ์เหล่านี้ มีอายุเฉลี่ยอยู่ระหว่าง 30-200 ล้านปี
ผลงานของคณะนักดาราศาสตร์ไทย มีความสำคัญต่อความรู้เกี่ยวกับระยะแรก ๆ ของกำเนิดจักรวาลแบบบิกแบง เพราะข้อมูลความรู้ที่มีอยู่เกี่ยวกับสภาพและการก่อกำเนิดของสรรพสิ่ง ไม่ว่าจะเป็นดวงดาว กาแล็กซีและรวมถึงหลุมดำด้วย ยังมีอยู่น้อย และเป็นผลงานแสดงศักยภาพและความสามารถของนักดาราศาสตร์ไทยในเวทีระดับโลก

(5) ปลาก็ใช้การลงโทษเพื่อสร้างวินัย
คณะนักวิทยาศาสตร์ที่มหาวิทยาลัยโอซากาเมโทรโพลิทัน ตีพิมพ์รายงานในวารสาร Animal Behaviour ฉบับเดือนพฤษภาคม พ.ศ. 2567 ผลการศึกษาวิจัยพบว่า ปลาหมอสีพันธุ์ Neolamprologus Savoryi ก็ใช้วิธีการลงโทษเพื่อให้ลูกปลาและฝูงปลามีวินัยในการทำหน้าที่เพื่อปกป้องเผ่าพันธุ์ พฤติกรรมที่เข้าใจกันตลอดมาว่ามีอยู่เฉพาะในสัตว์มีกระดูกสันหลังชั้นสูง โดยเฉพาะอย่างยิ่ง "มนุษย์"
คณะนักวิทยาศาสตร์รายงานว่า การใช้วิธีการลงโทษเพื่อสร้างวินัย เป็นพฤติกรรมที่มีอยู่ในมนุษย์ และในสัตว์มีกระดูกสันหลังชั้นสูงบางชนิด สำหรับปลา โดยเฉพาะอย่างยิ่ง ปลาหมอสี เคยมีการศึกษาพบว่ามีแนวโน้มจะรู้จักการใช้วิธีการลงโทษเพื่อสร้างวินัยบางอย่างในฝูง แต่ก็ไม่ชัดเจน
เป้าหมายของการศึกษาวิจัยครั้งนี้ ต้องการเจาะศึกษาพฤติกรรมดังกล่าวว่ามีจริงหรือไม่ ในปลาหมอสีพันธุ์ที่เลือกศึกษา โดยออกแบบวิธีการศึกษาดูพฤติกรรมการอยู่ร่วมกันเป็นฝูงของปลา

ผลการศึกษาพบว่า ปลาหมอสีพันธุ์ที่ศึกษามีพฤติกรรมการใช้วิธีการลงโทษลูกปลาและปลาในฝูง เพื่อให้ทำหน้าที่อย่างน้อยสองอย่างชัดเจน คือ ในการปกป้องถิ่นที่อยู่อาศัยจากผู้บุกรุก และสถานที่เป็นแหล่งเพาะพันธุ์ปลา
วิธีการที่ใช้ คือ ปลาผู้รักษาวินัยของฝูง ใช้วิธีการลงโทษ (ทำร้าย) ลูกปลาและปลาในฝูงที่ละเลยการทำหน้าที่ในการปกป้องถิ่นที่อยู่และแหล่งเพาะพันธุ์
คณะนักวิทยาศาสตร์รายงานว่า ปลาในฝูง รวมถึงลูกปลาที่ถูกลงโทษจากการละเลยหน้าที่ ก็เปลี่ยนพฤติกรรม หันมาทำหน้าที่อย่างแข็งขัน แสดงว่า การลงโทษเพื่อสร้างวินัยได้ผล
ศาสตราจารย์ ซาโตชิ อะวาตะ (Satoshi Awata) หนึ่งในคณะนักวิทยาศาสตร์กล่าวถึงผลการศึกษาว่า นอกเหนือไปจากมนุษย์ สัตว์ก็มีการใช้การลงโทษสำหรับการสร้างพฤติกรรมเพื่อการดำรงอยู่ของกลุ่ม...
และกล่าวอีกว่า เราจำเป็นจะต้องพิจารณาศึกษาความหมายของ "intelligence" (สติปัญญา, ความฉลาด) กันใหม่ มิใช่เฉพาะในฝูงปลา แต่กับอาณาจักรสัตว์ทั้งหมด
***********
(ติดตามอีก 5 ยอดข่าววิทยาศาสตร์ปี 2567 ใน "10 ยอดข่าววิทยาศาสตร์ปี 2567 (ตอน 2)")